(hear Time Direction Message) formában
(see Time ObjInfo ObjInfo ...) formában
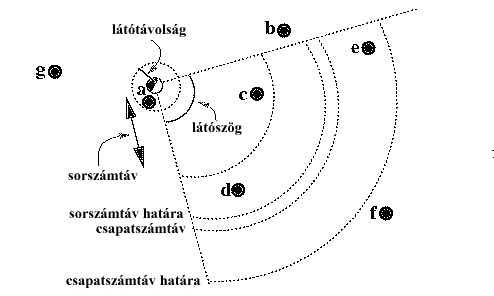
ObjInfo név, távolság, irány, távolság- és irányváltozás
adatokat tartalmaz, a két utolsóból lehet a sebességre következtetni
(sense_body 95 (view_mode high normal) (stamina 1280 1) (effort 1.0)
(recovery 1.0) (speed 0.39)
say): 512 bájt hosszú ASCII sztringek, amit mindkét csapat
meghall
turn): max 180 fok, nagyobb sebességnél kisebb szög lehetséges (lendület)
dash): játékosok haladási irányba mozoghatnak, elõre vagy hátra,
elõre gyorsabban (késõbbi változatokban már megjelent a nyak, ezért a látvány és a
haladási irány nem feltétlenül esik egybe)
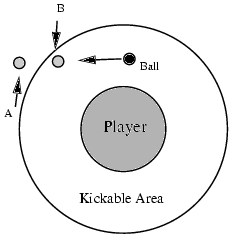
kick): négy jellemzõ tulajdonsága van
kickable_area nagyságának megfelelõ
területen belül tudja a játékos eltalálni (valóságban ez nem mûködik)
catch): csak kapusok, a büntetõterületen belül, csak megfelelõ távolságból
change_view,
sense_body
**-> (dash 100.00)
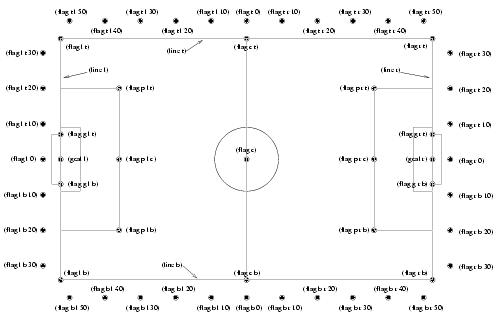
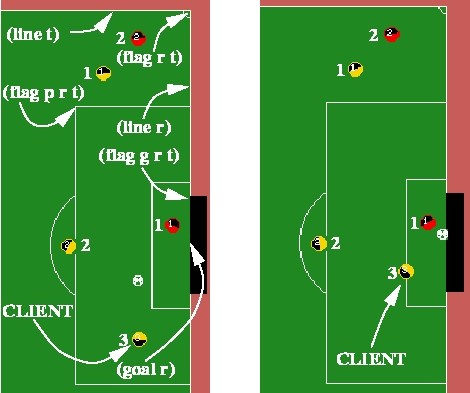
(see 94 ((goal r) 15.3 27) ((flag r t) 47.9 8) ((flag p r t) 34.8 -15) ((flag p r c) 16.4 -34 0 0)
((flag g r t) 21.8 19) ((ball) 8.2 0 0 0) ((player CMUnited) 40.4 -8)
((player CMUnited 2) 16.4 -37 0 0 117) ((player Opponent 1) 16.4 15 0 0 -148)
((player Opponent) 44.7 0) ((line t) 47.5 89))
**-> (sense_body)
(sense_body 95 (view_mode high normal) (stamina 1280 1) (effort 1.0) (recovery 1.0) (speed 0.39)
*-> (dash 100.00)
(see 96 ((goal r) 13.6 31) ((flag r t) 46.1 8) ((flag p r t) 33.1 -16) ((flag p r c) 14.9 -39 -0.298 -0.9)
((flag g r t) 19.9 20 -0.398 0.5) ((ball) 6.7 -2 -0.402 0) ((player CMUnited) 36.6 -8)
((player CMUnited 2) 14.9 -41 -0.298 -0.9 117) ((player Opponent 1) 14.9 17 -0.298 -148)
((player Opponent) 40.4 0) ((line t) 45.6 89))
**-> (dash 100.00)
**-> (sense_body)
(sense_body 97 (view_mode high normal) (stamina 1120 1) (effort 1.0) (recovery 1.0) (speed 0.44)
**-> (dash 100.00)
.
.
.
(hear 103 -70 shoot the ball) (see 104 ...((ball) 1.8 6 0.108 5.4) ...)
**-> (say shooting now)
**-> (kick 100.00 65.40)
(hear 104 self shooting now)
**-> (sense_body)
(sense_body 105 (view_mode high normal) (stamina 980 1) (effort 1.0) (recovery 1.0) (speed 0)
**-> (turn 31.76)
(see 106 ... ((ball) 4.1 14 1.23 7) ...)
**-> (turn 14.00)
.
.
.
**-> (dash 100.00)
(see 112 ((goal r) 6.8 12) ((flag r t) 38.5 -32) ((flag g r t) 12.3 -14 -0.246 0) ((ball) 7.4 2 0.74 1.5)
((player Opponent 1) 7.4 -18 -0.148 -0.2 107) ((player Opponent) 33.1 -44) ((line r) 8.2 -40))
(hear 113 referee goal_l_1)
(hear 113 referee kick_off_r)
kickable_area területén

kickable_area területén tartva a
labdát talán jobb lövés érhetõ el
catch
utasítással elfogni
float frame: aktuális cselekvés képe
float skin: kinézet
vector origin: térbeli pozíció
vector size: entitás mérete
vector oldorigin: korábbi pozíció
vector angles: haladási irány
vector velocity: sebesség
float health: energiaszint
float items: tárgyak a játékosnál
float armorvalue: páncélzat értéke
void() think = {...};
entity() FindTarget = {...};
void(vector destination, float speed, void() callback)
SUB_CalcMove = {...};
void() framename = [$framenum, nextthink] { ...code...};
ami az alábbinak felel meg:
void() framename =
{
self.frame= $framenum; // the model frame to displayed
self.nextthink = time + 0.1; // next frame happens in 1/10 of second
self.think = nextthink; // the function to call at the next frame
...code...
};
if( expression )
{
statements
}
else
{
statements
}
while( expression )
{
statements
}
do
{
statements
}while( expression )
function_name ( parameter1, parameter2,... )
!, &&, ||, <=, <, >=, >, ==, !=, *, /, -, +, &, |
world: minden változó és objektumok listájának tárolására
time: a szimuláció ideje
self: a játékost képviselõ entitás
other: az ellenfél
mapname: az aktuális térkép
normalize: vektor normálása
vectoyaw: vektor szögének visszaadása
entity find (entity start, .string field, string match): entity findradius (vector origin, float radius): radius sugarú környezetben
float walkmove(float yaw, float dist): yaw irányba dist távolságot, ha lehetséges
vector aim(entity e, float missilespeed): e entitásnak a legközelebbi
ellenfelét meg lehet céloznia
traceline (vector v1, vector v2, float nomonsters, entity forent):v1 és v2 között a közvetlen összeköttetést
vizsgálja, eredményül globális változókat állít be