
Soha jobb alkalom korábban nem adódott, hogy Magyarországról meglátogassuk a Robocup-ot, vagyis az éves robot-világbajnokságot, mivel eddig még ilyen közel nem volt hozzánk efféle rendezvény. Idén június 29. és július 5. között az ausztriai Graz rendezte meg ezt az eseményt, mely szinte évente földrészt vált. Tavaly a kínai Suzhou, azelőtt pedig Atlanta volt a rendező város.
Ezúttal a világ 40 országából érkezett mintegy 3000 versenyző, betöltve a Stadthalle, azaz a város két, összesen húszezer négyzetméteres rendezvénycsarnokának területét.

De miért is érdemes elutazni egy ilyen látványosságra?
A laikus érdeklődő számára a verseny egyfajta kirakata annak, hogy a komoly cégek által szponzorált, jónevű egyetemek kutató-mérnök-programozó csapatai jelenleg hol tartanak az önjáró, önálló feladatvégzésre képes gépek létrehozásában. Bárki testközelből megfigyelheti a néhány centiméteres gurulótól a másfél méteres magasságú lépegető robotig bezárólag sokféle szerkezet teljesítményét, egyrészt a nevetséges csetlés-botlást, másrészt a néha szemmel is nehezen követhető páratlanul gyors és hatékony megoldásokat.
A Robocup bevallott célja a versenyen keresztül motivációt adni a kutatáshoz olyan területeken, mint a mozgáskivitelezés, képfeldolgozás, navigáció, tervgenerálás, osztott feladatmegoldás. Ezen kívül a versenyzésen keresztül a pontos szabályok miatt összemérhetővé válnak az eredmények, követhetőbbé válik a fejlődés.

A versenyzés a kezdetektől különféle ligákban zajlik, melyek száma az évek során nőtt, a megoldandó feladatok is egyre nehezebben teljesíthetővé váltak. Ausztriában a következő ligák szerepeltek:
| futball |
|
| mentés |
|
| háztartási | Otthoni munkákban segítő robotok versenyzése. |
| junior |
|
| demo | Egyéb demonstrációs ligák: nanogram, minirobotok, Festo jégkorongozás. |
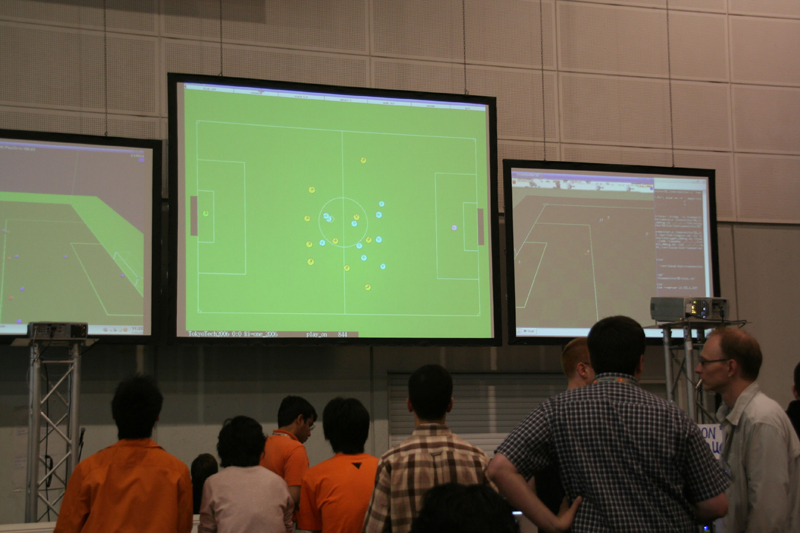
A kereken guruló, hagyományos robotok versenye is két különböző nagyságban a kicsi, 15 centiméteres és a közepes, 80 centiméteres méretű robotok között zajlik, előbbi 6*4, utóbbi 18*12 négyzetméteren. Bár a nagyobb robotoknál is láthattunk szép gólokat, különösen a kis méretűek versenye volt élvezhető. Ez adódott egyrészt abból, hogy ez a liga az egyik legpatinásabb, így az egyik legkiforrottabb is. Másrészt a kis robotok feladata egyszerűbb, mivel a játéktér fölé függesztett kamera képéből egy központi számítógép által előfeldolgozott formában ismerhetik meg a teljes játékteret, és ez alapján tervezik meg cselekvéseiket, míg a nagyobb robotok saját kamerájuk képét kell, hogy feldolgozzák összes többi feladatuk mellett. Ez speciális körkörös optikák felhasználásával is a többi játékos takarása miatt csak részleges ismereteket adhat a környezetről. Ugyanakkor a kisméretű robotoknál tilos volt a vakus fényképezés, mert az megzavarta volna a képfeldolgozást, vagyis láthatóan az itt meglévő megoldások is érzékenyek a külvilág változásaira, ami pedig valós feladatnál alapkövetelmény lesz.


A kis robotok általában három-négy keréken, szinte tetszőleges irányban nagy sebességgel mozogtak, akár egy másodperc alatt átértek a pálya átellenes végébe. A jobbak kis hókotróra emlékeztető tolókarjukkal rendkívül erősen, szinte az emberi szabadrúgások sebességével "ágyúzták" előre a labdát, így többször csak a koppanás hangjából lehetett kikövetkeztetni, hogy gól esett. A többség ezekkel a karokkal emelésre is képes, fél pályáról a sorfalon keresztül akár a 20 centiméter magas kapuba is. A leginkább meggyőző mégis az volt, hogy a nagyszerűen kimunkált egyéni viselkedés mellett, a csapatjáték is komoly szerephez jutott. A kis robotok közti végső győztes Skuba csapat hátvédje például félpályás, tökéletesen pontos passzt adott a jobbszélsőnek, "aki" hezitálás nélkül, mintha csak a falról irányítottan pattant volna vissza a labda, közvetlenül a kapuba lőtte azt. A rögzített szituációk is a csapattagok együttműködésének jó példái. Amikor a labda kimegy a játéktérről, a játékvezető sípol, és vezeték nélküli kapcsolaton megüzeni a robotoknak, hogy áll a játék. Ekkor mindegyikük megpróbál visszatérni eredeti pozíciójába, például a hátvédek visszaállnak a kapu közelébe, illetve a csatárok egy 50 centiméteres zónát szabadon hagyva követik a labdát. Ezután a bíró megmondja, hogy ki jön "berúgással", szöglettel, szabadrúgással, aminek hatására újra megelevenedik a pálya: az újabb vezetői üzenet után a támadó robotok egyike az állított labdához megy, társai pedig a passzhoz helyezkednek, míg a védekező fél megpróbálja a labda útját blokkolni, akár egy háromelemű sorfallal.
A szép megoldások ellenére a játék élvezhetősége látja kárát a monotonitásnak, ami abból adódik, hogy viszonylag véges a csapatok taktikai repertoárja, így azonos szituációban általában ugyanúgy viselkednek. Emiatt lehet az, hogy egymás után 4-5 szöglet is következhet: ugyanazt a beadást az egyformán helyezkedő védő mindig az alapvonalon túlra lövi. Másrészről ugyanabból a szögletből mindig gólt rúghat egy jobb csapat, ha a gyengébb ellenfél mindig azonos, hibás felállással próbálkozik, ahogy az a későbbi bajnok KIKS elleni negyeddöntőjén is látható volt.
A mérkőzések másik problémája, hogy a robotok korántsem megbízhatóak, emiatt sokszor kell a hibás robotot helyben másodpercek alatt rendbe hozni vagy levinni és cserélni. Gyakori eset, hogy az akkumulátor a 10 perces félidőt sem bírva lemerül, annak ellenére, hogy ezt minden bizonnyal a kezdés előtt ellenőrzik. Ezen kívül a robotok tetszőleges pillanatban és okból megzavarodhatnak. Ilyen szituáció volt a közepes robotok versenyében, amikor a tavalyi bajnok, későbbi bronzérmes CAMBADA csapat kapusa, "aki" a térfelén percek óta magányosan állt, egyszer csak betolatott a kapuba, és elkezdett felmászni rá, ütemesen püfölve az oldalát. Az egyik fejlesztő elmondása szerint a robot valamiért megcserélte a saját magáról ismert koordinátáit, így azt hitte, hogy az ellenfél kapuja előtt van. Ekkor az egyetlen helyes döntés, amit hozhatott, hogy villámgyorsan visszamegy a saját kapuját védeni. A hasonló, akár a robotfejlesztők által is csak találgatott hibaokok miatt könnyen előfordult, hogy a kétszer 5 játékos helyett csupán csapatonként 2-3 robot volt egyszerre a pályán annak ellenére, hogy többnyire 1-2 tartalék játékos is bevetésre várt.
A többi futballozó liga a kerekes robotok helyett az emberformájúak fejlesztésére összpontosít, a járás jóval nehezebb feladata miatt egyelőre kevesebb eredménnyel. A Sony cég Aibo nevű robotkutyáját 2008-ban felváltó Aldebaran Nao egy 35 centiméteres emberforma robot, mely a pusztán funkcionális egyetemi robotoknál az üzlet szabályainak megfelelően sokkal szebben néz ki. A helyszíni és az interneten is megtalálható demonstrációk alapján nagyon ügyesen guggol, feláll, fél lábon egyensúlyoz, és interakciót kezdeményez emberi partnerével.
Ennek ellenére a verseny során ennél jóval kevesebbre volt képes. Láthatóan már a járás is gondot okoz neki, túl nagy sebességnél az oldalirányú kilengés úgy felerősödhet, hogy egyszerűen eldől. Ha másik robottal ütközik, akkor szinte garantált az elesés. Amikor araszolva megközelíti a labdát, akkor igen könnyen elvéti a kapu felé irányított lövést. Ugyanis hiába van két kamerája, nem tud egyszerre a közeledés hatására egyre lejjebb lévő labdára és a horizonton látható kapura nézni. Emiatt gyakori az oldalvonal felé lövés vagy a még viccesebb luftot rúgás. Ezek után ráadásul a lövéskor fél lábon egyensúlyozó robot gyakran el is esik. Nem véletlen, hogy a bemelegítő tesztfeladatok nehézsége is jóval a valódi mérkőzés kihívása alatt van: 2 csapattagnak kell "teniszeznie", vagyis háromszor egymás után kell fogadnia, majd a társ térfelére lőnie a labdát. Miután ez a feladat is nehézséget okozott a valódi, három-három játékosos mérkőzés is többnyire az egyensúlyozásról, a labda vánszorgó megközelítéséről, egymás véletlen felborításáról, a taktika hiányáról és néhány esetleges gólról szólt, ami a robot 10 ezer euros árát figyelembe véve eléggé sovány eredménynek tűnik.
Ehhez eléggé hasonló a helyzet a tiniméretű liga méteres magasságú emberformájú robotjainál, melyek a Naoval ellentétben mind saját építésűek. Itt a szervezők már nem is valódi mérkőzéseken döntötték el a végső sorrendet, mivel a csapatok itt csupán egy-két fősek voltak, egyrészt a költségek növekedése, másrészt az építés összetettsége miatt. A valódi meccs helyett kvázi tizenegyesrúgásokkal derült ki, hogy ki a legjobb. Az 5 elvégzett büntetőig tartó sorozatban a támadó felet a kezdőkörben helyezték el, a labdát pedig valahol mögötte. Így a robotnak először meg kellett fordulnia, vagy vissza kellett hátrálnia, amíg meglátja a labdát, majd a labda megközelítése után a támadó térfélre rúgva-terelve lőhette kapura azt. A Naonál sokkal magasabb robotok még inkább instabilak voltak, a lövés egyensúly szempontjából kritikus pillanatában volt olyan csapat, ahol a fejlesztő majdnem átölelte a robotot, hogy a valószínű eleséskor ne érje sérülés a szerkezetet. A kísérletek gyakran már korábban elbuktak: a robotok sokszor nem voltak képesek a lövéshez rendelkezésre álló 2 perc alatt a labdát megfelelően megközelíteni. Ha mégis sikerrel jártak, akkor a kapus teljesítménye hagyott maga után kívánnivalót. Valódi védésről, vetődésről az eddigiekből adódóan nem is beszélhetünk. A robotnak csupán annyi volt a feladata, hogy akadály legyen, ha a lövés véletlen a kapu közepe felé irányul. Mindezek mellett a végső győztes Nimbro csapat a többiekhez képest megbízhatóan mozgott, és lőtte a gólokat.
A leginkább meggyőző emberformájú robotok a gyerekméretű ligában versenyeztek. Ezek a Naonál valamivel kisebb, szintén saját építésű robotok sokszor élvezetes meccset produkáltak. No nem feltétlenül a látványos foci miatt, hanem inkább a bohóctréfára emlékeztető gyakori összeütközések, elesések, feltápászkodások kavalkádja volt látványos. A robotok a földre esve elég gyorsan újra fölálltak, és ismét a labda felé vették az irányt, de ha egymásra dőltek, akkor már többnyire emberi segítségre is szükség volt a robotok összegabalyodása miatt, így a fejlesztők is sűrűn bejöttek a kis játéktérre, tovább növelve a zsúfoltságot. Bár itt már gólokban sem volt hiány, mégis a taktika kevéssé volt része a robotok viselkedésének, gyakran három csapattag is egyszerre tartott a labda felé, aminek eredménye az lett, hogy mind egymásra estek. Ezen kívül amint a labdával a kapu felé sikerült fordulni, gyakorlatilag bárhonnan lőttek, sokszor sikerrel. Ugyanakkor itt a kapusokat is dicséret illeti, többször észlelték a kapu felé tartó labdát, villámgyorsan eldőltek a megfelelő oldalra, és sikeresen kivédték a lövést.
A "csupán" a számítógép belsejében zajló szimulációs liga korong alakú játékosai 10 évvel ezelőtt kezdtek el a labdakezelés, kapura lövés egyéni, illetve a helyezkedés, passzolás, stratégia csapatszintű problémáival foglalkozni és mára odáig jutottak el, hogy a tavalyi bajnoknál gyengébb demonstrációs változatnak az érdeklődő emberi játékosok nem igazán tudtak gólt lőni (viszont annál többet kaptak). A hatékonyság növekedésére válaszul néhány éve megjelent a háromdimenziós szimulációs liga a tér és egyúttal a probléma egy új dimenzióját adva.
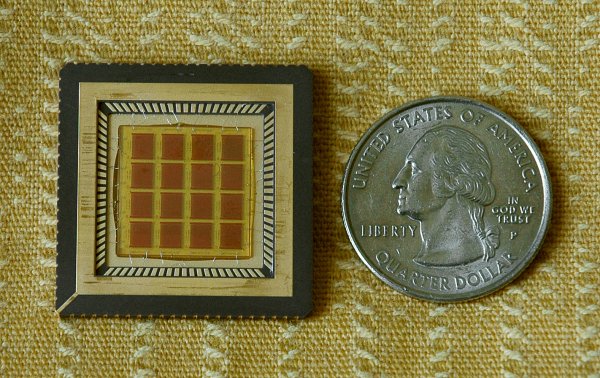
A valódi robotok között olyan különlegességek bukkantak föl, mint a relatíve kis költségű, nagyjából két centiméteres minirobotok bajnoksága, amiben a pálya fölött elhelyezett kamera képéből nyert információ alapján próbálnak a versenyzők gólt szerezni. Ennél is újabb és kisebb "játszótér" a demonstrációs céllal szereplő nanorobotok, melyek egy mikrocsip 16, rízsszemnyi focipályáján a mikroszkopikus méretű intelligens gépek lehetőségeit mutatja be.
Érdemes megemlíteni, hogy a Robocup már nem csupán robotfutball-világbajnokság, a RoboRescue és a Robocup@Home ligák a focinál direktebb haszonnal kecsegtetnek. Előbbi feladat egy kezdeti lépés a robotok katasztrófahelyzetben való felhasználhatósága felé, mely az 1995-ös kobei földrengés hatására jelent meg a világbajnokság programjában 1999-ben. Ebben a versenyben a robotoknak egy farostlemezből épített 10*8 négyzetméteres labirintust kellett bejárniuk, és ott megtalálni az emberi áldozatokat, amit a területen elhelyezett játékbabák jelképeztek. A feladat lényegesen eltért a sík talajú focizástól, mivel a labirintus padlója is különféle dőlésszögű lemezekből állt, néhol lépcsőzetesen elhelyezett kockákon kellett átjutni, valamint 45 fokos emelkedőkre is föl kellett mászni a sikeres teljesítéshez. Az itt szereplő robotok a terepnek megfelelően lánctalpas vagy sokkerekű járművek voltak, melyek kamerával és lézeres távolságmérővel térképezték föl a környezetüket, sokszor hosszú időn át egy helyben "gondolkodva". A feladat nehézségének megfelelően lehetőség nyílt arra is, hogy egy fejlesztő a "mentési központból" távirányítsa a robotját. Ekkor azonban a legkönnyebb kategóriába tartozó célok megtalálása már nem számított eredménynek.
A jobb robotok tucatnál is több áldozatot voltak képesek megtalálni, mégis a versenyekkel párhuzamos előadásokból kiderült, hogy a mentési feladat tökéletes teljesítése is nagyon kevés ahhoz a kihíváshoz képest, amit egy valódi szituáció jelent. Így például a WTC leomló ikertornyai vagy a márciusi kölni városi archívum összedőlése utáni mentéskor tapasztaltak alapján látszik, hogy a robotoknak valószerűtlenül szűk helyeken kell mozogniuk, sokszor szinte függőleges omlásokat leküzdve. Ezen kívül mindent belep a por, szinte egységes szürke színt adva az omlás miatt sötét környezetnek, miközben a szálló por miatt nagyon kicsi a látótávolság is. Ráadásul a robotoknak a nedvességgel, sárral is meg kell küzdeniük, mivel az automatikus oltóberendezések a katasztrófa pillanatában legtöbbször működésbe lépnek. Ehhez képest a RoboRescue liga feladata gyerekjátéknak tűnik.
A másik nem futballal kapcsolatos liga a Robocup@Home, ahol háztartási feladatokat kell megoldania a robotoknak. Itt elsősorban a lakásszerű környezetben kellett megbízhatóan navigálni és kommunikálni az ott található emberekkel. Ezeket a lényegesen eltérő tudást jelentő képességeket különféle részfeladatok során tesztelték, melyek mindegyike a környezet megismerése, emberi szavak értelmezése és tárgyak szállítása körül mozgott.
A középmezőny néhány mérkőzése alapján látható, hogy ez az új liga - bár sokat fejlődött az elmúlt két év alatt - még mindig gyerekcipőben jár: az emberek megtalálását és név szerinti beazonosítását célul kitűző party feladat során egymás után három robot sem vett észre egy embert sem a 4 önkéntesből a rendelkezésre álló 10 perc alatt. A megtaláláshoz a kamerák képére alapozott arcfelismerés mellett a padló közelében végzett lézeres távolságmérés adhatott volna segítséget, mégpedig a lábszárakról visszavert jel alapján. Sajnos mindkét azonosítási próbálkozás nehézségekbe ütközött: az arcfelismerést a több tucat néző zavarta meg, aki a terep egyik oldalán ült, míg a fal közelében álló, illetve ülő emberek lábait úgy tűnt, szinte lehetetlen távolságméréssel meghatározni. A részleges eredménytelenség további oka, hogy a robotok nagyon óvatosan mozogtak, láthatóan ügyelve arra, hogy ne menjenek neki semminek. Emiatt többször percekig helyben jártak és térképezték a környezetüket. A megbízhatóság sem volt a robotok erőssége, hiszen több robotot az indulás után egy perccel újraindítottak, mert némi tétova, szinte helyben járás után megzavarodott. Az összesítésben végül 8. német versenyző, Tobi, aki ebben a feladatban 4. lett, csupán arra kapott pontot, hogy miután nem talált meg senkit, és észlelte, hogy hamarosan lejár az ideje, elindult a kijárat felé, és még szintidőn belül sikeresen kijutott a lakásból.
Érdemes megemlíteni, hogy az egyetemisták versenyzése mellett a nagyobb csarnok felső szintje teljesen a még fiatalabbaké volt. Ők is több kategóriában versenyeztek, melyek egyike természetesen a foci volt. Ehhez a kisebbek, akár készen vásárolható robotkészletből (például a LEGO Mindstorms csomagja) is elkészíthették a játékosokat.
A vonalkövetés feladatára nevezőknek egy kis asztalon kellett a fehér alapon lévő fekete színű szigetelőszalagot követniük, akár egy rámpán fölfelé is. Végezetül a tánc ligában robotok és gyerekek vegyesen mutattak be táncos produkciókat, ahol a robotépítés és programozás mellett a kosztümok és egyéb díszítő elemek elkészítése is hangsúlyos szerepet kapott.
Bár az itt felsorolt sok kritika alapján úgy tűnhet, hogy a rendezvény csupán egyetemisták és az új technikákért rajongók bennfentes gyűlése, de a helyszínen ez korántsem így hat. Az egy hetes rendezvény hangulatához hozzátartozik, hogy érdekes látni a több száz asztalt, rajta a rengeteg robottal és még több számítógéppel a csarnokok központi részén, ahol a nyüzsgést a pár nap után fáradtan szerelő, programozó fejlesztők biztosítják. A mérkőzések során a többi csapatból és lelkes érdeklődőkből verbuválódott közönség a góloknál ujjong, a látványos vagy akár a technikailag érdekes megoldásokat is megtapsolják. A ligákat bemutató angol és német nyelvű demonstrációkra még állóhelyet is nehéz találni.

Az eredményekből pedig az szűrhető le, hogy a robotok képviselte katasztrofális vagy áldásos új világ még egy darabig nem jön el, a 13. robot-világbajnokság egy látványos bemutatója volt a mobil robotok jelenlegi fejlettségi szintjének.
Az eseményről további fényképek találhatók itt.

A Petőfi Rádió Netidők című műsorában beszéltünk a
Robocup2009-ről. A felvétel
online itt
hallgatható meg vagy le is tölthető.